Trong mặt phẳng Oxy cho ba vectơ \(\overrightarrow{a}\) = (0;1) ; \(\overrightarrow{b}\) = (-1;2) ; \(\overrightarrow{c}\) = (-3;-2) tọa độ của vectơ \(\overrightarrow{U}\) = 3\(\overrightarrow{a}\) +2\(\overrightarrow{b}\) -4\(\overrightarrow{c}\) là...
K
Khách
Hãy nhập câu hỏi của bạn vào đây, nếu là tài khoản VIP, bạn sẽ được ưu tiên trả lời.

Những câu hỏi liên quan
HQ
Hà Quang Minh
Giáo viên
26 tháng 9 2023
a)
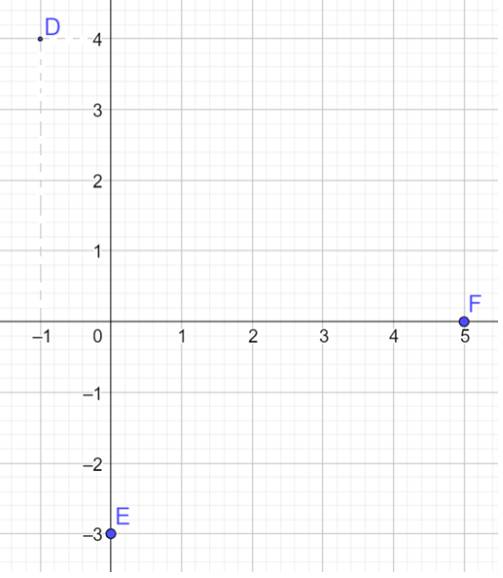
b) Vì tọa độ vectơ \(\overrightarrow {OM} \) chính là tọa độ của điểm M (với mọi M) nên ta có:
\(\overrightarrow {OD} = \left( { - 1;4} \right),\overrightarrow {OE} = \left( {0; - 3} \right),\overrightarrow {OF} = \left( {5;0} \right)\)
c)
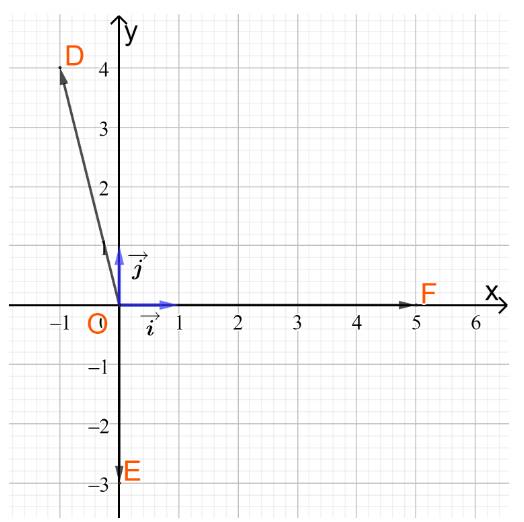
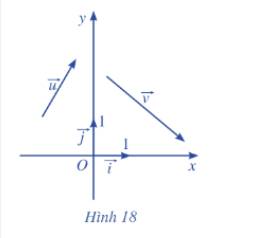
Từ hình vẽ ta có tọa độ của hai vectơ và \(\overrightarrow j \)là
và \(\overrightarrow j = (0;1)\)
HQ
Hà Quang Minh
Giáo viên
26 tháng 9 2023
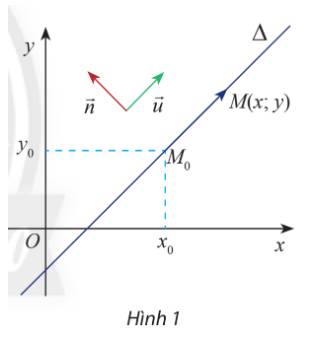
a) Ta có \(\overrightarrow n .\overrightarrow u = a.b + b.( - a) = 0\)
Tích vô hướng bằng 0 nên hai vectơ \(\overrightarrow n ,\overrightarrow u \)có phương vuông góc với nhau
b) Vectơ \(\overrightarrow {{M_0}M} \) có giá là đường thẳng \(\Delta\)
=> luôn cùng phương với vectơ \(\overrightarrow u \)
=> vectơ \(\overrightarrow {{M_0}M} \) có phương vuông góc với vectơ \(\overrightarrow n \)
HQ
Hà Quang Minh
Giáo viên
28 tháng 9 2023
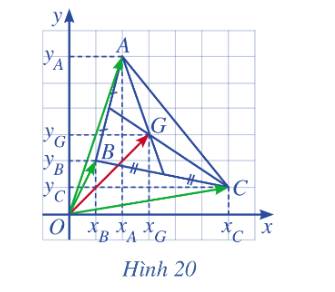
a) Ta có vectơ \(\overrightarrow {OG} \) theo ba vectơ \(\overrightarrow {OA} \) , \(\overrightarrow {OB} \)và \(\overrightarrow {OC} \) là: \(\overrightarrow {OG} = \frac{1}{3}\left( {\overrightarrow {OA} + \overrightarrow {OB} + \overrightarrow {OC} } \right)\)
b) Do tọa độ ba điểm A , B và C là: \(A\left( {{x_A},{y_A}} \right),B\left( {{x_B},{y_B}} \right),C\left( {{x_C},{y_C}} \right)\) nên ta có:\(\overrightarrow {OA} = \left( {{x_A},{y_A}} \right),\overrightarrow {OB} = \left( {{x_B},{y_B}} \right),\overrightarrow {OC} = \left( {{x_C},{y_C}} \right)\)
Vậy\(\overrightarrow {OG} = \frac{1}{3}\left( {\overrightarrow {OA} + \overrightarrow {OB} + \overrightarrow {OC} } \right) = \frac{1}{3}\left( {{x_A} + {x_B} + {x_C};{y_A} + {y_B} + {y_C}} \right) = \left( {\frac{{{x_A} + {x_B} + {x_C}}}{3};\frac{{{y_A} + {y_B} + {y_C}}}{3}} \right)\)
Tọa độ điểm G chính là tọa độ của vectơ \(\overrightarrow {OG} \) nên tọa độ G là \(G\left( {\frac{{{x_A} + {x_B} + {x_C}}}{3};\frac{{{y_A} + {y_B} + {y_C}}}{3}} \right)\)
HQ
Hà Quang Minh
Giáo viên
24 tháng 9 2023
a) Ta có: \(\overrightarrow u = (2; - 3)\)
\( \Rightarrow \overrightarrow u = 2.\;\overrightarrow i + \left( { - 3} \right).\;\overrightarrow j \)
Tương tự ta có: \(\overrightarrow v = (4;1),\;\overrightarrow a = (8; - 12)\)
\( \Rightarrow \overrightarrow v = 4.\;\overrightarrow i + 1.\;\overrightarrow j ;\;\;\overrightarrow a = 8.\;\overrightarrow i + \left( { - 12} \right).\;\overrightarrow j \)
b) Ta có: \(\left\{ \begin{array}{l}\overrightarrow u = 2.\;\overrightarrow i + \left( { - 3} \right).\;\overrightarrow j \\\overrightarrow v = 4.\;\overrightarrow i + 1.\;\overrightarrow j \end{array} \right.\)(theo câu a)
\(\begin{array}{l} \Rightarrow \left\{ \begin{array}{l}\overrightarrow u + \;\overrightarrow v = \left( {2.\;\overrightarrow i + \left( { - 3} \right).\;\overrightarrow j } \right) + \left( {4.\;\overrightarrow i + 1.\;\overrightarrow j } \right)\\4.\;\overrightarrow u = 4\left( {2.\;\overrightarrow i + \left( { - 3} \right).\;\overrightarrow j } \right)\end{array} \right.\\ \Leftrightarrow \left\{ \begin{array}{l}\overrightarrow u + \;\overrightarrow v = \left( {2.\;\overrightarrow i + 4.\;\overrightarrow i } \right) + \left( {\left( { - 3} \right).\;\overrightarrow j + 1.\;\overrightarrow j } \right)\\4.\;\overrightarrow u = 4.2.\;\overrightarrow i + 4.\left( { - 3} \right).\;\overrightarrow j \end{array} \right.\\ \Leftrightarrow \left\{ \begin{array}{l}\overrightarrow u + \;\overrightarrow v = 6.\;\overrightarrow i + \left( { - 2} \right).\;\overrightarrow j \\4.\;\overrightarrow u = 8.\;\overrightarrow i + \left( { - 12} \right).\;\overrightarrow j \end{array} \right.\end{array}\)
c) Vì \(\left\{ \begin{array}{l}4.\;\overrightarrow u = 8.\;\overrightarrow i + \left( { - 12} \right).\;\overrightarrow j \\\overrightarrow a = 8.\;\overrightarrow i + \left( { - 12} \right).\;\overrightarrow j \end{array} \right.\) nên ta suy ra \(4.\;\overrightarrow u = \overrightarrow a \)
HQ
Hà Quang Minh
Giáo viên
29 tháng 9 2023
Nhận xét
• Nếu \(\overrightarrow n \) là một vectơ pháp tuyến của \(\Delta \) thì \(k\overrightarrow n \ne \overrightarrow 0 \left( {k \ne 0} \right)\)cũng là một vectơ pháp tuyến của \(\Delta \).
• Một đường thẳng hoàn toàn được xác định khi biết một điểm và một vectơ pháp tuyến của đường thẳng đó.
• Nếu đường thẳng \(\Delta \) có vectơ chỉ phương là \(\overrightarrow u = \left( {a;b} \right)\) thì vectơ \(\overrightarrow n = \left( { - b;a} \right)\)là một vectơ pháp tuyến của \(\Delta \).
T
6 tháng 12 2021
a, \(\overrightarrow{BA}=\left(0-4;-2-1\right)\)
=\(\left(-4;-3\right)\)

HQ
Hà Quang Minh
Giáo viên
29 tháng 9 2023
Nhận xét
• Nếu ủ là một vectơ chỉ phương của A thì \(k\overrightarrow u \) (\(k \ne 0\))cũng là một vectơ chỉ phương của A.
• Một đường thẳng hoàn toàn được xác định khi biết một điểm và một vectơ chỉ phương của đường thẳng đó.
HQ
Hà Quang Minh
Giáo viên
28 tháng 9 2023
Để xác định điểm A, ta làm như sau (Hình 8):
• Qua O kẻ đường thẳng d song song với giá của vectơ \(\overrightarrow u \).
• Lấy điểm A trên đường thẳng d sao cho hai vectơ \(\overrightarrow {OA} \), \(\overrightarrow u \) cùng hướng và độ dài đoạn thẳng OA bằng độ dài vectơ \(\overrightarrow u \).
HQ
Hà Quang Minh
Giáo viên
28 tháng 9 2023
a) Do \(\overrightarrow u = \left( {{x_1},{y_1}} \right)\), \(\overrightarrow v = \left( {{x_2},{y_2}} \right)\) nên \(\overrightarrow u = {x_1}\overrightarrow i + {y_1}\overrightarrow j .\), \(\overrightarrow v = {x_2}\overrightarrow i + {y_2}\overrightarrow j .\)
b) +) \(\overrightarrow u + \overrightarrow v = \left( {{x_1}\overrightarrow i + {y_1}\overrightarrow j } \right) + \left( {{x_2}\overrightarrow i + {y_2}\overrightarrow j } \right) = \left( {{x_1}\overrightarrow i + {x_2}\overrightarrow i } \right) + \left( {{y_1}\overrightarrow j + {y_2}\overrightarrow j } \right) = \left( {{x_1} + {x_2}} \right)\overrightarrow i + \left( {{y_1} + {y_2}} \right)\overrightarrow j \)
+) \(\overrightarrow u - \overrightarrow v = \left( {{x_1}\overrightarrow i + {y_1}\overrightarrow j } \right) - \left( {{x_2}\overrightarrow i + {y_2}\overrightarrow j } \right) = \left( {{x_1}\overrightarrow i - {x_2}\overrightarrow i } \right) + \left( {{y_1}\overrightarrow j - {y_2}\overrightarrow j } \right) = \left( {{x_1} - {x_2}} \right)\overrightarrow i + \left( {{y_1} - {y_2}} \right)\overrightarrow j \)
+) \(k\overrightarrow u = \left( {k{x_1}} \right)\overrightarrow i + \left( {k{y_1}} \right)\overrightarrow j \)
c) Tọa độ của các vectơ \(\overrightarrow u + \overrightarrow v \),\(\overrightarrow u - \overrightarrow v \),\(k\overrightarrow u \left( {k \in \mathbb{R}} \right)\)lần lượt là:
\(\left( {{x_1} + {x_2};{y_1} + {y_2}} \right),\left( {{x_1} - {x_2};{y_1} - {y_2}} \right),\left( {k{x_1},k{y_1}} \right)\)
HQ
Hà Quang Minh
Giáo viên
24 tháng 9 2023
a) Vì điểm M có tọa độ (x; y) nên vectơ \(\overrightarrow {OM} \) có tọa độ (x; y).
Và điểm N có tọa độ (x’; y’) nên vectơ \(\overrightarrow {ON} \) có tọa độ (x’; y’).
b) Ta có: \(\overrightarrow {MN} = \overrightarrow {ON} - \overrightarrow {OM} \) (quy tắc hiệu)
Mà \(\overrightarrow {OM} \) có tọa độ (x; y); \(\overrightarrow {ON} \) có tọa độ (x’; y’).
\( \Rightarrow \overrightarrow {MN} = \left( {x';y'} \right) - \left( {x;y} \right) = \left( {x' - x;y' - y} \right)\)
c) Vì \(\overrightarrow {MN} \) có tọa độ \(\left( {x' - x;y' - y} \right)\) nên \(\left| {\overrightarrow {MN} } \right| = \sqrt {{{\left( {x' - x} \right)}^2} + {{\left( {y' - y} \right)}^2}} \)
\(3\overrightarrow{a}=\left(0;3\right)\)
\(2\overrightarrow{b}=\left(-2;4\right)\)
\(-4\overrightarrow{c}\left(12;8\right)\)
=> \(\left\{\begin{matrix}u=0+3+12=15\\u=3+4+8=15\end{matrix}\right.\)
=>U(15;15)